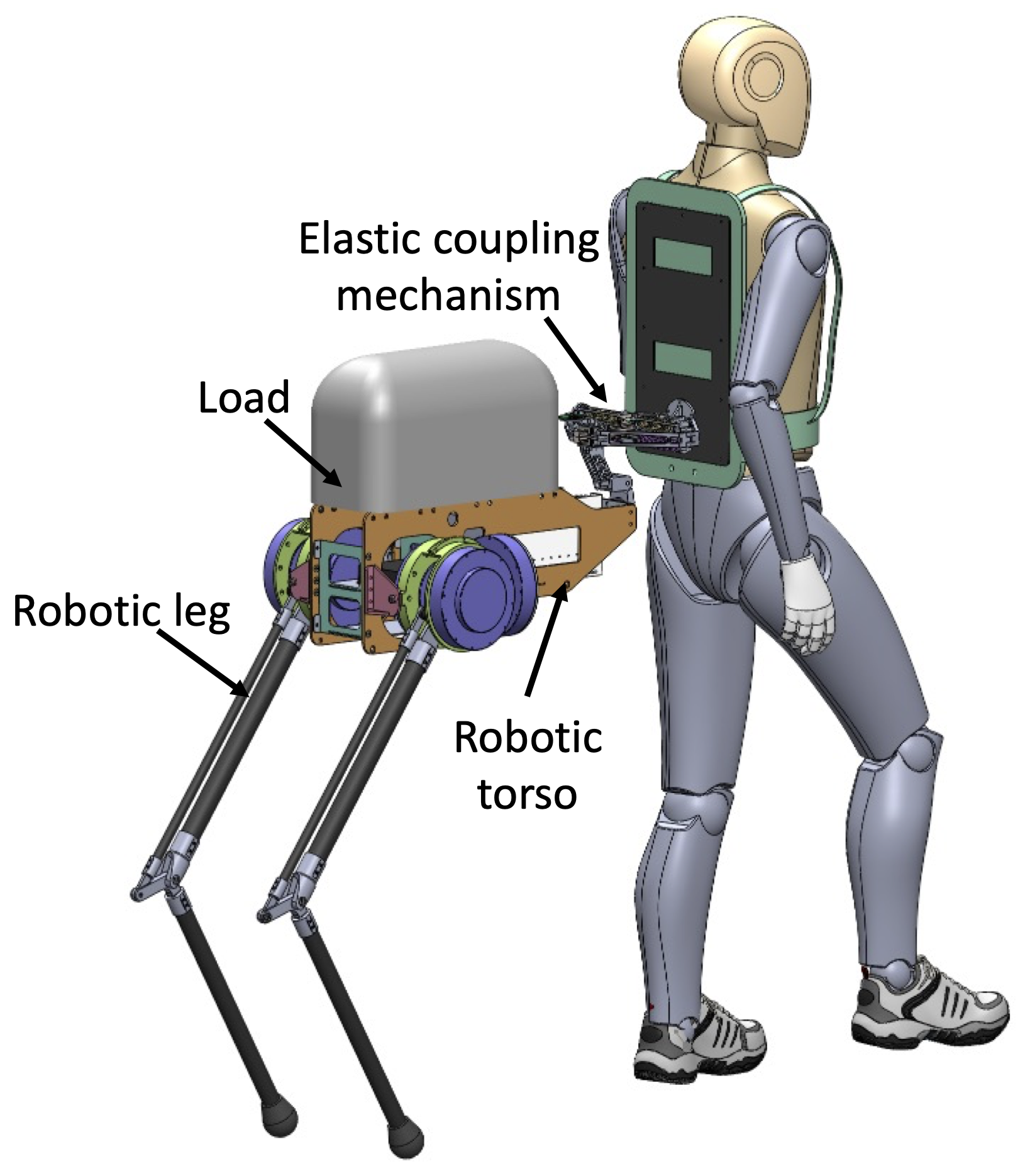
दक्षिणी विज्ञान और प्रौद्योगिकी विश्वविद्यालय के प्रोफेसर फू चेंगलोंग की टीम ने मूल रूप से एक पहनने योग्य सेंटौर वजन वहन करने वाला चलने वाला रोबोट विकसित किया। प्रासंगिक परिणाम रोबोटिक्स के क्षेत्र में आधिकारिक पत्रिकाओं में प्रकाशित किए गए हैं। पारंपरिक एक्सोस्केलेटन रोबोटों की सहायता क्षमता कम होती है और वे मानव चयापचय दर को लगभग 10% तक ही कम कर सकते हैं।सेंटौर रोबोट पारंपरिक डिज़ाइन को तोड़ता है और चौपायों के भार वहन करने वाले रूप से प्रेरणा लेता है। स्वतंत्र अंगों के रूप में, यह मानव-मशीन हाइब्रिड चौगुनी प्रणाली बनाने के लिए पहनने योग्य लोचदार युग्मन इंटरफ़ेस के माध्यम से मानव पीठ से जुड़ा हुआ है।
रोबोट एक नरम लोचदार युग्मन तंत्र से सुसज्जित है, जिसमें गैर-रेखीय कठोरता विशेषताएं हैं और बिजली सहायता और संतुलन के गतिशील डिकॉउलिंग का एहसास होता है; वॉकिंग-इंटरैक्शन सहयोगी नियंत्रण ढांचे के साथ संयुक्त,यह वास्तविक समय में मानव शरीर की गति के इरादे को समझ सकता है, मैन्युअल निर्देशों के बिना उच्च परिशुद्धता के साथ सभी दिशाओं में इसका पालन कर सकता है, और एक ही समय में स्थिर क्षैतिज जोर आउटपुट कर सकता है।
प्रायोगिक सत्यापन से पता चलता है कि रोबोट का प्रदर्शन उत्कृष्ट है। गतिशीलता के संदर्भ में, यह 1 मीटर की संकीर्ण जगह में ढेर के चारों ओर "8" आकृति सर्कल को पूरा कर सकता है, और सीढ़ियों और ढलानों जैसी जटिल सड़क सतहों से आसानी से गुजर सकता है।
वजन वहन करने वाले प्रदर्शन के संदर्भ में,20 किलो वजन उठाने पर, मानव शरीर की शुद्ध चयापचय लागत 35% कम हो जाती है, और पैरों के तलवों पर दबाव 52% कम हो जाता है।, स्थिरता और शून्य-भार चलने के बीच कोई महत्वपूर्ण अंतर नहीं है।
यह रोबोट आपातकालीन बचाव, क्षेत्र अन्वेषण, जटिल इलाके रसद समर्थन और अन्य परिदृश्यों के लिए उपयुक्त है, और भविष्य में मानव शरीर की शारीरिक सीमाओं को तोड़ने की उम्मीद है।