जर्मनी में वुर्जबर्ग विश्वविद्यालय की एक शोध टीम ने हाल ही में एक फोटोन-चालित नैनोरोबोट विकसित किया है, जिसका व्यास मानव बाल के व्यास का लगभग पचासवां हिस्सा है। यह तरल सूक्ष्मदर्शी वातावरण में बैक्टीरिया को सटीक रूप से ट्रैक, कैप्चर, ट्रांसपोर्ट और रिलीज़ कर सकता है, जिससे मनुष्यों को माइक्रोबियल दुनिया को सीधे नियंत्रित करने के लिए एक नया तकनीकी मार्ग प्रदान किया जा सकता है।
रिपोर्टों से पता चलता है कि इस प्रकार के माइक्रो-रोबोट का उद्देश्य सूक्ष्म पैमाने पर संचालन करना है जिसमें पारंपरिक तरीकों से प्रभावी ढंग से हस्तक्षेप करना लगभग असंभव है। तरल वातावरण में एकल कोशिकाओं और बैक्टीरिया जैसी जैविक सामग्रियों के लिए, उच्च-परिशुद्धता नियंत्रण कैसे प्राप्त किया जाए, यह हमेशा वैज्ञानिक अनुसंधान में एक बड़ी समस्या रही है, और इस नए परिणाम से पता चलता है कि बैक्टीरिया को इकट्ठा करने और स्थानांतरित करने जैसे कार्य अब संभव हैं।
शोध दल का नेतृत्व जर्मनी में जूलियस-मैक्सिमिलियंस यूनिवर्सिटी वुर्जबर्ग के प्रोफेसर बर्ट हेचट ने किया था। टीम द्वारा प्रस्तावित मुख्य समाधान "माइक्रो-ड्रोन" नामक माइक्रोन-स्केल डिवाइस की गति को चलाने के लिए एकल फोटॉन उत्सर्जित होने पर उत्पन्न कमजोर रिकॉइल का उपयोग करना है।
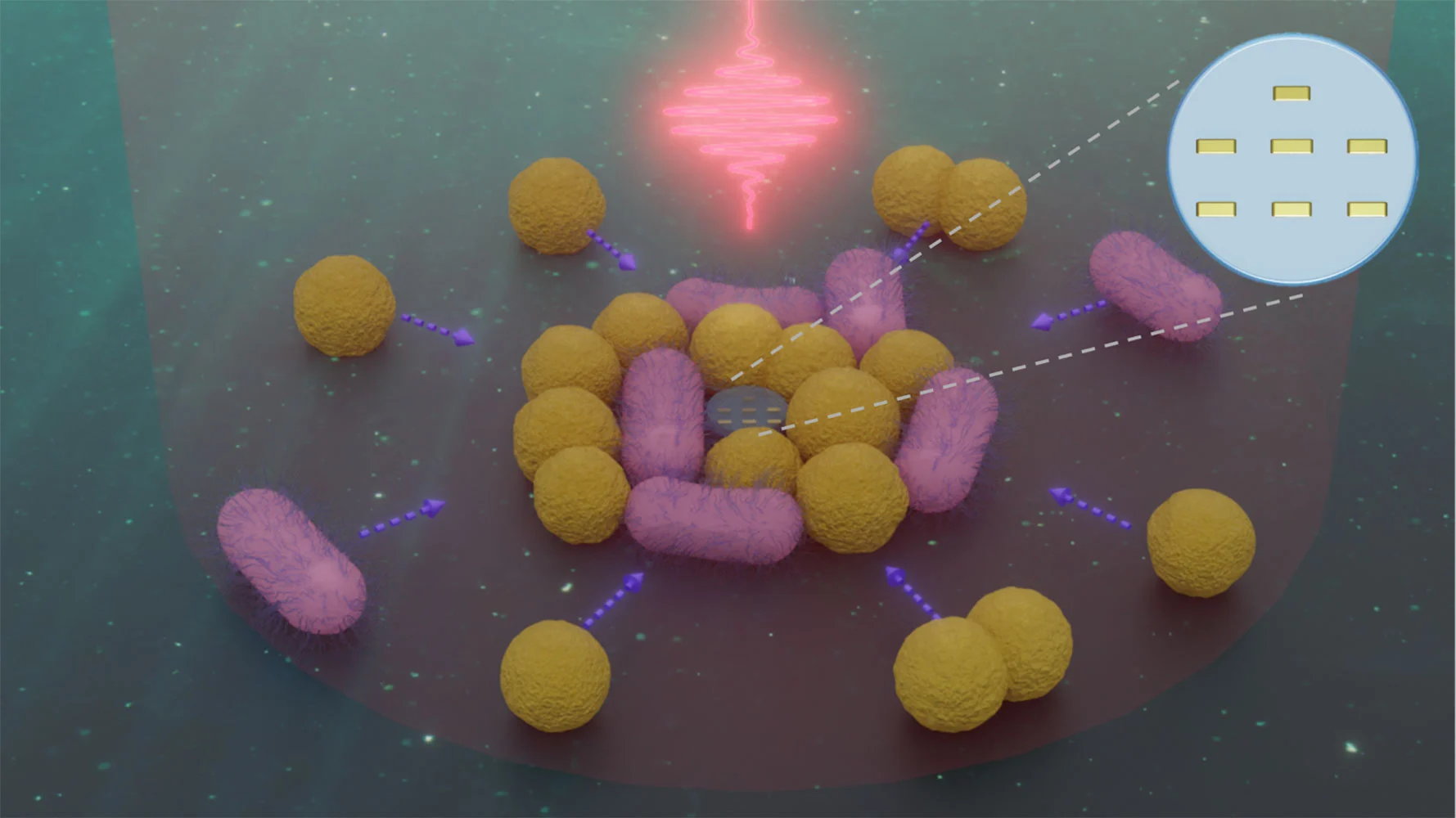
रिपोर्टों के अनुसार, इन उपकरणों के अंदर चार प्लास्मोनिक नैनोएन्टेना को एकीकृत किया जा सकता है। वे पहले विशिष्ट गुणों के साथ प्रकाश को अवशोषित करते हैं, और फिर दिशात्मक तरीके से फोटॉन को फिर से उत्सर्जित करते हैं; प्रत्येक शॉट एक अत्यंत छोटा रिकॉइल बल लाएगा, जो बैरल से बाहर निकलने के बाद गोली के रिकॉइल बल के सिद्धांत के समान है। चूंकि माइक्रोरोबोट का द्रव्यमान स्वयं बेहद कम है, भले ही यह बल बहुत कमजोर हो, फिर भी यह उच्च गति और तीव्र त्वरण लाने के लिए पर्याप्त है।
नवीनतम शोध में, शोधकर्ताओं ने इस प्रकार के प्रकाश-चालित रोबोट के आकार को 1 माइक्रोन से भी कम कर दिया है और इसकी नियंत्रण विधि को सरल बना दिया है, लेकिन फिर भी फोटॉन रीकॉइल के आधार पर प्रणोदन तंत्र को बरकरार रखा है।
टीम ने इस तथ्य का लाभ उठाया कि रोबोट के अंदर एंटीना तार स्वाभाविक रूप से घटना प्रकाश की ध्रुवीकरण दिशा के साथ संरेखित होते हैं। प्रकाश की ध्रुवीकरण स्थिति को समायोजित करके, शोधकर्ता रोबोट की दिशा को नियंत्रित कर सकते हैं, और इसकी आगे की गति अभी भी फोटॉन रीकॉइल से आती है, जो इसकी नियंत्रण विधि को मैक्रोस्कोपिक परिवहन के "स्टीयरिंग प्लस प्रोपल्शन" मोड के करीब बनाती है।
पेपर पर पहले प्रायोगिक वैज्ञानिक जिन किन ने कहा कि संक्षेप में, टीम ने जो बनाया है वह प्रकाश द्वारा संचालित एक नैनोरोबोट है, जो बैक्टीरिया को लॉक और एकत्र कर सकता है। सरलीकृत संरचना के कारण, रोबोट का आकार उस पैमाने तक कम कर दिया गया है जहां यह सीधे माइक्रोबियल गतिविधियों में प्रवेश कर सकता है, एक अर्थ में, यह "सूक्ष्म सफाई उपकरण" की तरह है।
शोधकर्ताओं ने कहा कि इस तरह के नैनोरोबोट में उच्च गतिशीलता होती है और यह जल्दी से 90-डिग्री मोड़ पूरा कर सकता है, इसलिए यह एक बड़े नमूना क्षेत्र में व्यवस्थित और कुशल स्कैनिंग कर सकता है। साथ ही, यह काफी संख्या में बैक्टीरिया को चुनिंदा रूप से पकड़ सकता है, परिवहन कर सकता है और छोड़ सकता है।
इसका मतलब यह है कि एक नियंत्रित प्रायोगिक वातावरण में, इस प्रकार के उपकरण से सूक्ष्म वातावरण पर "सफाई" ऑपरेशन करने की उम्मीद की जाती है - बैक्टीरिया को एक केंद्रित तरीके से इकट्ठा करना और उन्हें पूर्व निर्धारित स्थान पर ले जाना।
बर्ट हेचट ने बताया कि यह उपलब्धि स्पष्ट रूप से दर्शाती है कि प्रकाश का उपयोग न केवल सूक्ष्म दुनिया का निरीक्षण करने के लिए किया जा सकता है, बल्कि सूक्ष्म दुनिया को सक्रिय रूप से आकार देने के लिए भी किया जा सकता है। यद्यपि "माइक्रोरोबोट क्लीनर" की अवधारणा भविष्यवादी लगती है, प्रासंगिक भौतिक सिद्धांतों को अब प्रयोगात्मक रूप से सत्यापित किया गया है।
बैक्टीरिया के बड़े समूहों को ले जाने पर भी, नैनोरोबोट पूरी गतिशीलता बनाए रखते हैं, हालांकि उनकी गति की गति थोड़ी कम हो जाती है। शोध टीम का मानना है कि यह स्थिरता माइक्रोबायोलॉजी, बायोमेडिकल रिसर्च और अल्ट्रा-स्मॉल स्केल सटीक नियंत्रण जैसे क्षेत्रों में इसकी अनुप्रयोग क्षमता को और अधिक उजागर करती है।
प्रासंगिक शोध पत्र का शीर्षक "ए नैनोस्केल रोबोटिक क्लीनर" है, जिस पर जिन किन, कार्स्टन बुचनर, वू शियाओफेई और बर्ट हेचट द्वारा सह-हस्ताक्षर किए गए हैं और इसे 27 मार्च, 2026 को प्रकाशित किया गया था।