भले ही दुनिया का सबसे उन्नत कीट सूक्ष्म वायु वाहन (एमएवी) बनाया गया हो, लेकिन अगर यह स्थिर रूप से नहीं उतर सका तो अंततः इसका कोई उपयोग नहीं होगा। यही कारण है कि हार्वर्ड विश्वविद्यालय के वैज्ञानिकों ने अपने रोबोबी को जोड़ों के साथ, मच्छर जैसे लंबे पैरों की एक जोड़ी के साथ डिजाइन किया।
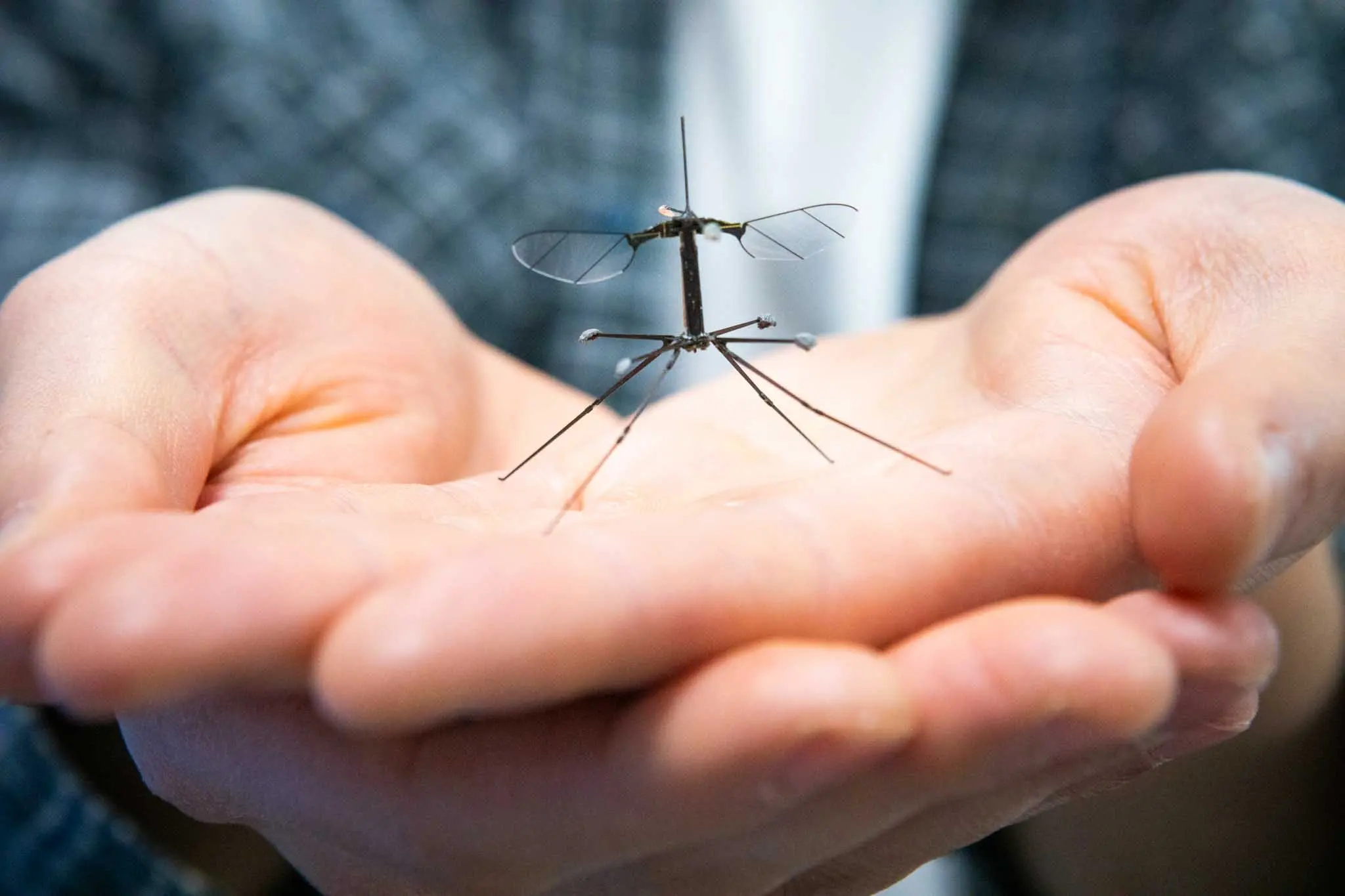
रोबोबी के पैर मच्छरों की नकल करते हैं - भविष्य के संस्करणों का उपयोग खोज और बचाव कार्यों में या फसल परागण के लिए किया जा सकता है
रोबोबी से अपरिचित लोगों के लिए, यह मधुमक्खी से प्रेरित एक रोबोट है जो कृत्रिम मांसपेशियों से सुसज्जित छोटे पंखों की एक जोड़ी को फड़फड़ाकर उड़ता है। इसके पंखों का फैलाव 3 सेंटीमीटर (1.2 इंच) से कम है और इसका वजन केवल एक ग्राम का दसवां हिस्सा है...हालांकि यह तारों के माध्यम से एक शक्ति स्रोत और माइक्रोप्रोसेसर से जुड़ा हुआ है। ऐसा कहा जा रहा है कि, भविष्य के संस्करण अंततः पूरी तरह से स्वतंत्र रूप से चल सकते हैं। वास्तव में, इसका एक सौर संस्करण पहले से ही मौजूद है।
जबकि इस छोटे रोबोट के अन्य संस्करण पानी के भीतर उड़ान भरने और लटकने से रोकने जैसे युद्धाभ्यास में सक्षम साबित हुए हैं, बेस मॉडल ने कभी भी सपाट (या अन्य) सतहों पर लैंडिंग में अच्छा प्रदर्शन नहीं किया है। ऐसा इसलिए है क्योंकि इसके फड़फड़ाते पंखों से बने भंवर जमीन से नियंत्रित होने पर हवा में अशांति पैदा कर सकते हैं, जिससे रोबोट अपना संतुलन खो सकता है।
रोबोट के मैकेनिकल रीडिज़ाइन का नेतृत्व करने वाले इंजीनियरिंग स्नातक छात्र क्रिश्चियन चैन ने कहा, "पहले, अगर हम उतर रहे थे, तो हम वाहन को जमीन से थोड़ा आगे बंद कर देते थे, इसे गिरने देते थे, और प्रार्थना करते थे कि यह सीधा और सुरक्षित रूप से उतर जाए।"

मच्छरों को धीरे से जमीन पर उतरने की उनकी क्षमता के लिए जाना जाता है
मच्छर के पैरों से प्रेरित रोबोबी के चार नए पैर इतने लंबे और लचीले हैं कि वे रोबोट के शरीर पर जमीनी प्रभाव की अशांति से प्रभावित होने से पहले सुरक्षित रूप से जमीन से संपर्क बना सकते हैं।
इसके अलावा, नए नियंत्रण एल्गोरिदम रोबोट को "बस गिरने" के बजाय अधिक आसानी से उतरने में मार्गदर्शन करने में मदद करते हैं।

रोबोबी के एक पत्ते से उड़ान भरने और अपने नए पैरों का उपयोग करके दूसरे पर उतरने का एकाधिक प्रदर्शन
पोस्टडॉक्टरल शोधकर्ता और शोध पत्र की सह-लेखिका एलिसा हर्नांडेज़ ने कहा, "विभिन्न प्रकार के कीड़ों के बीच जैविक प्रेरणा खोजने से हमें रोबोट में सुधार जारी रखने के अनगिनत तरीके मिलते हैं।" "बदले में, हम इन रोबोटिक प्लेटफार्मों का उपयोग जैविक अनुसंधान के लिए उपकरण के रूप में कर सकते हैं, ऐसे अध्ययन आयोजित कर सकते हैं जो बायोमैकेनिकल परिकल्पनाओं का परीक्षण करते हैं।"
यह पेपर हाल ही में साइंस रोबोटिक्स जर्नल में प्रकाशित हुआ था। नीचे दिए गए वीडियो में, आप रोबोबी को क्रेन फ्लाई की लैंडिंग गति की नकल करते हुए देख सकते हैं।
स्रोत: हार्वर्ड जॉन ए. पॉलसन स्कूल ऑफ इंजीनियरिंग एंड एप्लाइड साइंसेज