हमने पिछले कुछ वर्षों में कई अलग-अलग रोबोटिक वॉटर स्ट्राइडर देखे हैं, लेकिन वैज्ञानिक अभी भी इस कीट के बारे में नई प्रतिभाओं की खोज कर रहे हैं और उनकी नकल कर रहे हैं। उदाहरण के लिए, हाल ही में, शोधकर्ताओं ने एक वॉटर स्ट्राइडर रोबोट का आविष्कार किया है जो अपने पैरों पर पंखे का उपयोग करके पानी के पार तेजी से चल सकता है।

केवल 3 मिलीमीटर लंबा, रैगोवेलिया वॉटर स्ट्राइडर वास्तव में विशेष है। उनके दो लंबे मध्य पैर (प्रणोदन के लिए प्रयुक्त) पंखदार उपांगों में समाप्त होते हैं जो पानी से टकराने पर खुल जाते हैं। जैसे-जैसे वे आगे बढ़ते हैं, ये पानी के नीचे के उपांग मेंढक के पैर की उंगलियों के बीच के जाले की तरह पानी की सतह को ऊपर उठाते हैं, जिससे कीट तेजी से आगे बढ़ते हैं।
स्ट्रोक के अंत में, पंखे के आकार के टेंटेकल्स को पानी से बाहर निकाला जाता है, और गीले टेंटेकल्स एक बिंदु में एकत्रित हो जाते हैं - कुछ हद तक ताजे भीगे हुए पेंटब्रश के ब्रिसल्स की तरह। इससे टेंटेकल्स को अधिक सुव्यवस्थित आकार मिलता है क्योंकि पैर अगले स्ट्रोक की तैयारी में आगे की ओर झूलते हैं।

एक पंखेदार रैगोवेलिया वॉटर स्ट्राइडर - इस तस्वीर में, इसके पंखे और पंजे नीचे की ओर निर्देशित हैं, जो एक दर्पण की तरह पानी में प्रतिबिंबित होते हैं
पंखे के आकार की ये संरचनाएं कीड़ों को प्रति सेकंड लगभग 120 शरीर की लंबाई की गति से पानी में तेज़ी से चलने की अनुमति देती हैं। इसके अलावा, पानी की सतह के एक तरफ पानी सोखने वाले पंखे के आकार की संरचना स्थापित करके, वॉटर स्ट्राइडर लगभग 50 मिलीसेकंड में 90 डिग्री का चक्कर पूरा कर सकता है।
इस विचार के आधार पर, कैलिफोर्निया विश्वविद्यालय, बर्कले, दक्षिण कोरिया में अजौ विश्वविद्यालय और जॉर्जिया इंस्टीट्यूट ऑफ टेक्नोलॉजी के वैज्ञानिकों ने रैगोवेलिया का अधिक गहराई से अध्ययन करने का निर्णय लिया।
इलेक्ट्रॉन माइक्रोस्कोपी का उपयोग करते हुए, अजौ विश्वविद्यालय के प्रोफेसर जे-सुंग कोह और पोस्टडॉक्टरल शोधकर्ता डोंगजिन किम ने पाया कि प्रत्येक पंखे के आकार के व्यक्तिगत फिलामेंट में एक सपाट, लचीली, रिबन जैसी केंद्रीय पट्टी होती है, जिसके दोनों तरफ छोटे-छोटे बारबुल्स शाखाबद्ध होते हैं - वास्तव में एक पंख की तरह। यह डिज़ाइन पंखे के आकार के उपांग को पानी के भीतर खोलने की अनुमति देता है ताकि इसे पैडल की तरह इस्तेमाल किया जा सके।
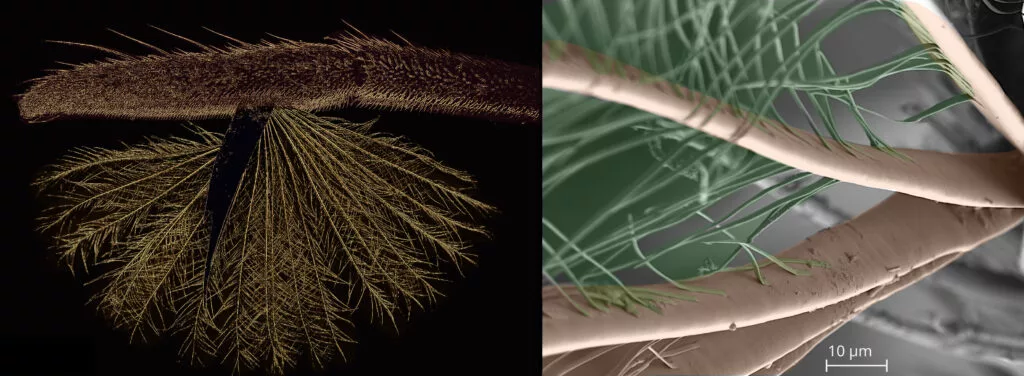
बाईं ओर रैगोवेलिया के दो पैडलिंग पैरों के सिरों पर पंखे और पंजों की एक तस्वीर है, और दाईं ओर पंखे की एक रंगीन स्कैनिंग इलेक्ट्रॉन माइक्रोस्कोपी छवि है जिसमें पंखे के बारबुल्स और छोटे बारबुल्स (हरा) के फ्लैट रिबन जैसी सूक्ष्म संरचना दिखाई दे रही है जो पंखे को बनाते हैं।
वैज्ञानिकों ने यह भी पता लगाया कि पानी की सतह का तनाव इन धागों को खोलने के लिए आवश्यक सभी लोचदार बल प्रदान करता है। पहले यह सोचा गया था कि यह प्रकट होने वाली क्रिया मांसपेशियों द्वारा संचालित होती है। स्ट्रोक के दौरान, इन धागों को तनाव में रखने के लिए थोड़ी मात्रा में मांसपेशीय बल का उपयोग किया जाता है, लेकिन उन्हें फैलाने के लिए किसी मांसपेशीय बल की आवश्यकता नहीं होती है।
इन निष्कर्षों के आधार पर, टीम ने रागोबोट नामक कीट का एक रोबोटिक संस्करण बनाया। यह निश्चित रूप से अपने नाम से बड़ा है, इसकी लंबाई 8 सेमी, चौड़ाई 10 सेमी और ऊंचाई 1.5 सेमी (3.1 x 3.9 x 0.6 इंच) है। इसके दो मध्य पैरों में से प्रत्येक के अंत में 1 मिलीग्राम रागोवेलिया जैसी पंखे के आकार की संरचना होती है जिसमें 10 x 5 मिलीमीटर मापने वाले फ्लैट रिबन जैसी माइक्रोस्ट्रक्चर होते हैं।

अर्ध-जलीय रोबोट रैगोबोट (बाएं) अपने बायोनिक पंखे के क्लोज़-अप के बगल में है, जो पानी के संपर्क में आने पर चालू हो जाता है
संपूर्ण रोबोट एक बाहरी शक्ति स्रोत से जुड़ा हुआ है और इसका वजन केवल एक ग्राम का पांचवां हिस्सा है। वर्तमान में, यह प्रति सेकंड दो शरीर की लंबाई की दूरी पर पानी के पार तेजी से चल सकता है और आधे सेकंड से भी कम समय में 90 डिग्री का चक्कर पूरा कर सकता है। आशा है कि रैगोबोट के वंशज खोज और बचाव या पर्यावरण निगरानी जैसे अनुप्रयोगों के लिए तेज़ और अधिक लचीले होंगे।
जॉर्जिया टेक प्रोफेसर साद बूमरा के साथ अध्ययन के वरिष्ठ सह-लेखक गाओ ने कहा, "हमारे रोबोटिक पंखे अपने जैविक समकक्षों की तरह केवल जल बल बलों और लचीली ज्यामिति का उपयोग करके स्वयं को विकृत करने में सक्षम हैं।" "यह एक प्रकार की यांत्रिक एम्बेडेड इंटेलिजेंस है जिसे लाखों वर्षों के विकास के बाद प्रकृति द्वारा परिष्कृत किया गया है। छोटे रोबोट के क्षेत्र में, यह कुशल और अद्वितीय तंत्र पारंपरिक रोबोट लघुकरण की सीमाओं को तोड़ने के लिए एक महत्वपूर्ण तकनीक बन जाएगा।"
इस शोध का नेतृत्व कैलिफोर्निया विश्वविद्यालय, बर्कले के सहायक प्रोफेसर ओर्टेगा-जिमनेज़ ने किया था और उनका पेपर हाल ही में साइंस जर्नल में प्रकाशित हुआ था। आप नीचे दिए गए वीडियो में रागोबोट को क्रियाशील होते हुए देख सकते हैं।
स्रोत: कैलिफोर्निया विश्वविद्यालय, बर्कले, जॉर्जिया इंस्टीट्यूट ऑफ टेक्नोलॉजी