संयुक्त राज्य अमेरिका में वेस्ट वर्जीनिया विश्वविद्यालय की एक शोध टीम ने हाल ही में एक नरम लेकिन शक्तिशाली नरम रोबोट हाथ विकसित किया है जो न केवल स्ट्रॉबेरी जैसे नाजुक फलों और सब्जियों को धीरे से उठा सकता है, बल्कि चुनने की प्रक्रिया के दौरान स्पर्श और दृष्टि के माध्यम से परिपक्वता का भी आकलन कर सकता है, जिससे चुनने की प्रक्रिया में श्रम लागत और अपशिष्ट दर में काफी कमी आने की उम्मीद है।
रिपोर्ट के मुताबिक, कृषि रोबोटिक तकनीक से तेजी से प्रभावित होने वाले उद्योगों में से एक बनती जा रही है। दुनिया भर के कई क्षेत्रों में किसान श्रम की कमी और बढ़ती श्रम लागत के दोहरे दबाव का सामना कर रहे हैं। कुछ फसलों में, मैन्युअल कटाई की लागत कुल उत्पादन लागत के आधे के करीब भी होती है। स्ट्रॉबेरी, रास्पबेरी और एवोकैडो जैसे फलों और सब्जियों के लिए, जिनकी तोड़ने की खिड़कियां बहुत कम होती हैं और आसानी से टूट जाती हैं, पारंपरिक मैन्युअल या कठोर यांत्रिक तुड़ाई के साथ दक्षता और हानि को संतुलित करना अक्सर मुश्किल होता है। परिणामस्वरूप, किसानों को अपनी उपज का एक चौथाई तक नुकसान हो सकता है।
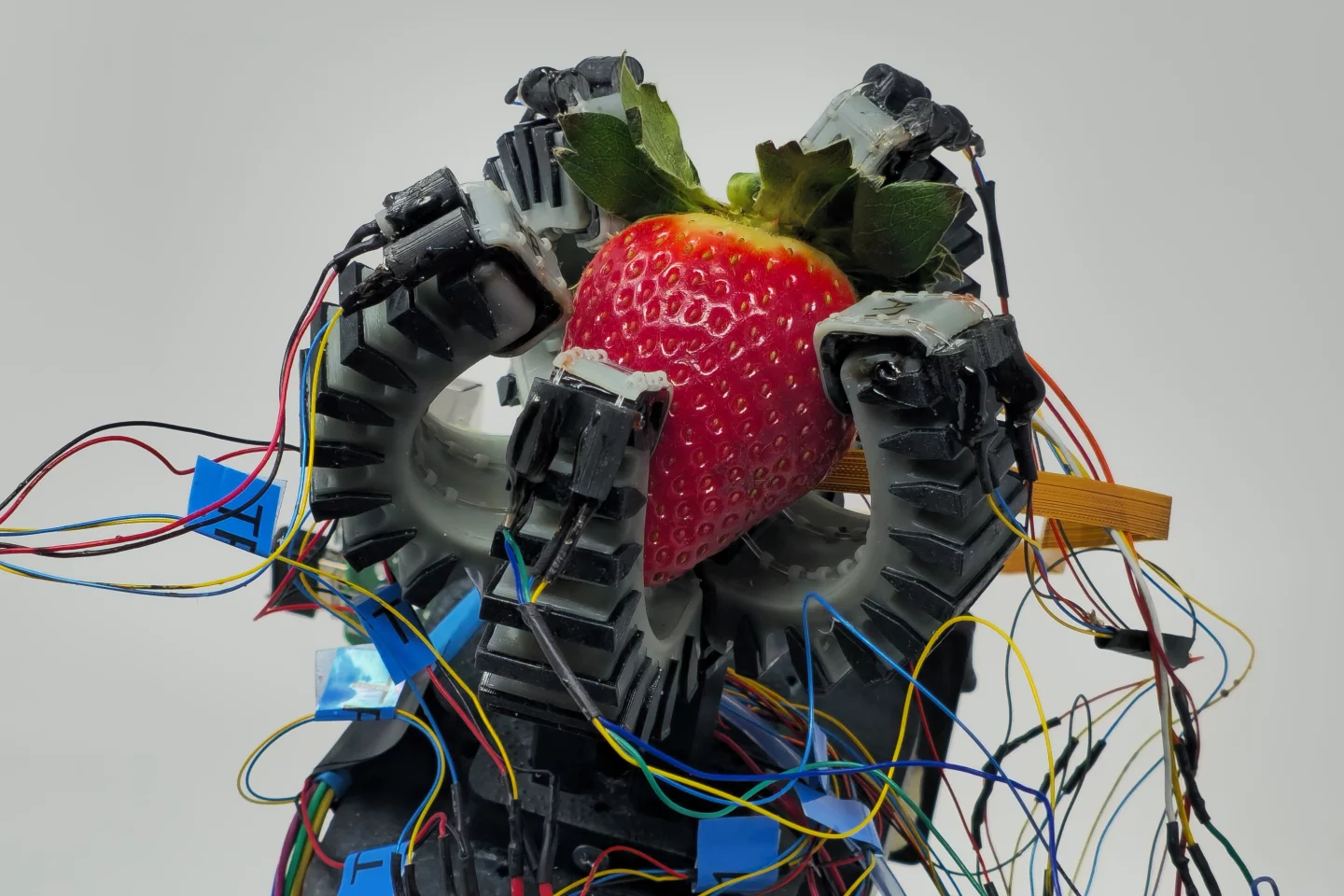
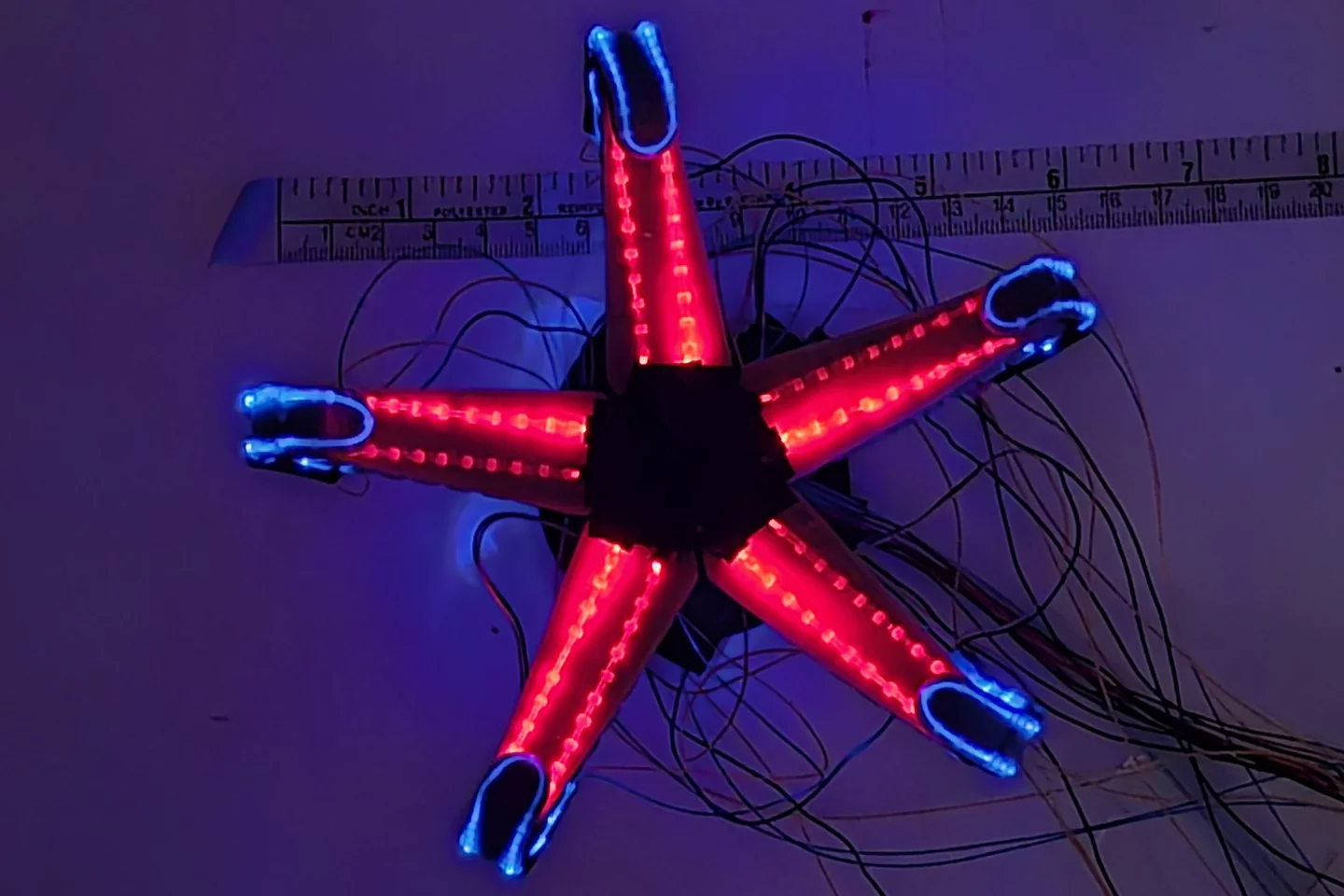
वेस्ट वर्जीनिया विश्वविद्यालय की "रोबायोटिक्स लैब" टीम ऐसे रोबोट विकसित करने पर काम कर रही है जो जानवरों की गतिविधियों की नकल करेंगे। इस बार लॉन्च किया गया नरम रोबोट हाथ वह धातु "मैकेनिकल पंजा" नहीं है जिसके बारे में लोग सोचते हैं। इसके बजाय, यह तारामछली की शारीरिक रचना से प्रेरणा लेता है और नरम उंगलियां बनाने के लिए सिलिकॉन और पॉलीयूरेथेन सामग्री का उपयोग करता है। साथ ही, समग्र आकार अभी भी मानव हाथ के समान पांच अंगुलियों वाला लेआउट बनाए रखता है, ताकि वह फलों को अधिक स्वाभाविक रूप से उठा और पकड़ सके।
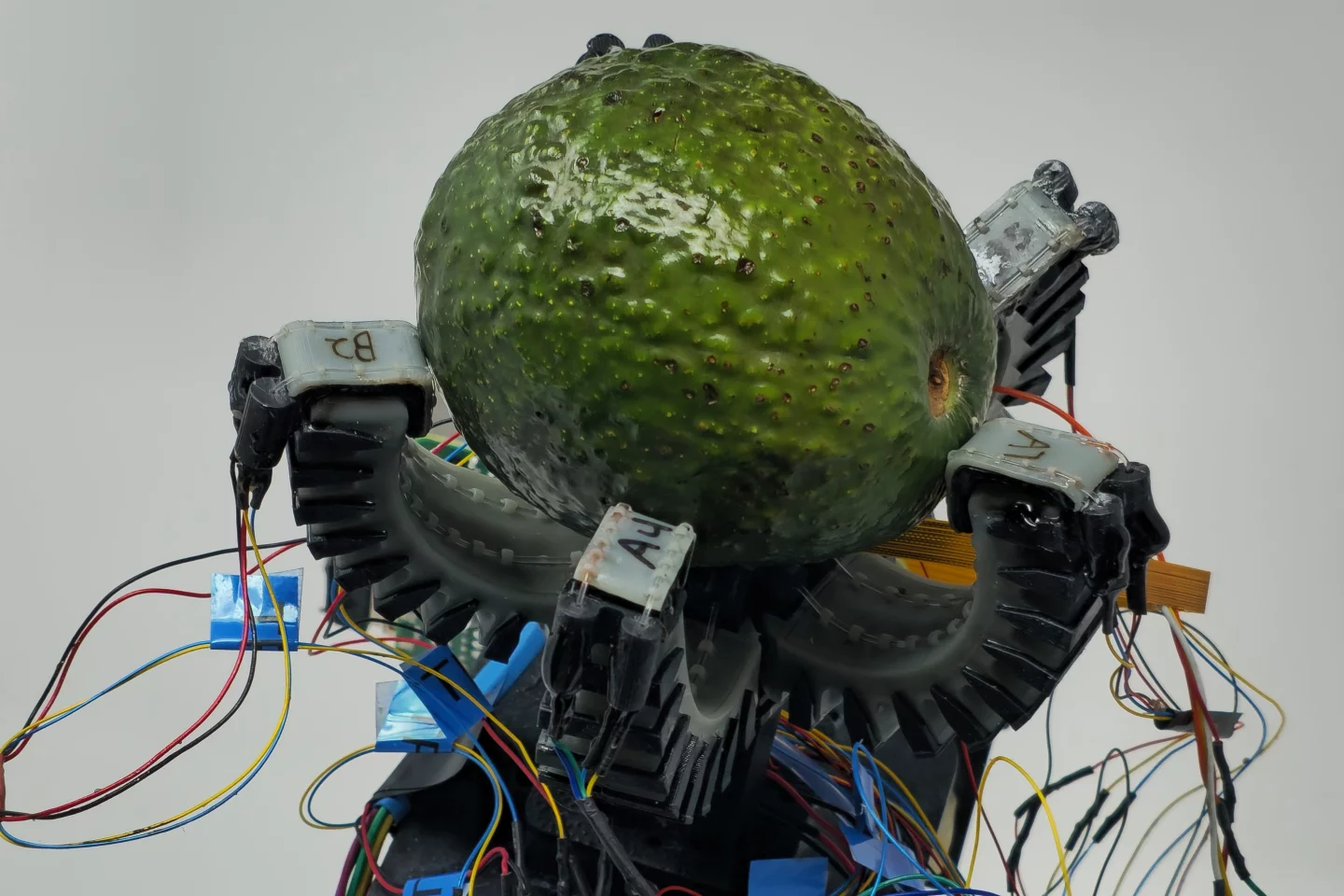
धारणा क्षमताओं के संदर्भ में, यह नया रोबोट हाथ फलों की उपस्थिति के दृश्य निर्णय के लिए एक लघु कैमरे से सुसज्जित है। यह फ़ंक्शन कुछ कृषि रोबोटों पर लागू किया गया है। हालाँकि, शोधकर्ताओं ने बताया कि केवल दिखावे पर निर्भर रहना परिपक्वता का सटीक आकलन करने के लिए पर्याप्त नहीं है। उदाहरण के तौर पर एवोकाडो को लेते हुए, उनकी परिपक्वता को अक्सर हल्की चुटकी से महसूस करने की आवश्यकता होती है। रोबोट को यह "मानव सहज" निर्णय कैसे सीखने दिया जाए, यह इस शोध में प्रमुख कठिनाइयों में से एक है।
इस समस्या को हल करने के लिए, अनुसंधान टीम ने नरम उंगलियों के अंदर विशेष स्पर्श सेंसर लगाए, ताकि जब रोबोट फल को धीरे से निचोड़े, तो वह फल को कुचले बिना कठोरता और लोच के बारे में भौतिक जानकारी प्राप्त कर सके। ये सेंसर वास्तविक समय में होल्डिंग स्ट्रेंथ की भी निगरानी कर सकते हैं। जब सिस्टम यह निर्धारित करता है कि वर्तमान पकड़ पर्याप्त मजबूत नहीं है, तो फल को फिसलने या जमीन पर गिरने से रोकने के लिए रोबोट स्वचालित रूप से बल को ठीक कर देगा।
परीक्षण चरण के दौरान, रोबोट के हाथ ने उच्च धारणा और नियंत्रण सटीकता का प्रदर्शन किया, और सेंसर लगभग 100% सटीकता के साथ पकड़े गए फल के आकार की भविष्यवाणी कर सकता है। वर्तमान प्रोटोटाइप डिवाइस का वजन 65 ग्राम से कम है, इसे खोलने और बंद करने में दो सेकंड से भी कम समय लगता है, और यह अधिकतम 1 किलोग्राम की वस्तु उठा सकता है, जो वास्तविक कृषि मशीनरी एकीकरण के लिए हल्के वजन और प्रतिक्रिया गति के लिए बुनियादी शर्तें प्रदान करता है।
मैकेनिकल, मैटेरियल्स और एयरोस्पेस इंजीनियरिंग विभाग में सहायक प्रोफेसर, प्रोजेक्ट लीडर आनंद मिश्रा ने कहा कि टीम अगले दो से चार वर्षों में इस सॉफ्टवेयर ग्रैस्पिंग तकनीक को वैश्विक बाजार में लाने की योजना बना रही है, और क्षेत्र में बड़े पैमाने पर तैनाती की जरूरतों को पूरा करने के लिए एक अधिक स्केलेबल ग्रैस्पिंग डिवाइस विकसित करने पर काम कर रही है। शोधकर्ता व्यापक परिदृश्यों में इस तकनीक के अनुप्रयोग की संभावनाओं के बारे में भी आशावादी हैं, जिसमें अंतरिक्ष मिशनों में अजीब वस्तुओं को पकड़ना, पानी के नीचे पर्यावरण की खोज और चिकित्सा देखभाल क्षेत्र में नाजुक ऊतकों और अंगों का सुरक्षित संचालन शामिल है।

प्रासंगिक शोध पत्र "नेचर कम्युनिकेशंस" पत्रिका में प्रकाशित हुए हैं, जिसमें दिखाया गया है कि सॉफ्टवेयर संरचनाओं, ऑप्टिकल फाइबर सेंसिंग और विज़न सिस्टम को संयोजित करने वाले रोबोट ग्रैस्पिंग समाधान उच्च-नुकसान, उच्च-सटीक परिदृश्यों के लिए एक महत्वपूर्ण तकनीकी मार्ग बन रहे हैं। शोधकर्ताओं ने बताया कि जैसे-जैसे इस तरह के सॉफ्ट रोबोट धीरे-धीरे व्यावसायीकरण की ओर बढ़ते हैं, खेत चुनने वाली अग्रिम पंक्ति पर मानव दबाव और फलों और सब्जियों के कचरे के अनुपात में काफी सुधार होने की उम्मीद है, जो सटीक कृषि और बुद्धिमान कृषि मशीनरी के विकास के लिए एक नया उपकरण आधार प्रदान करेगा।