ईपीएफएल, स्विट्जरलैंड में स्कूल ऑफ इंजीनियरिंग के लर्निंग एल्गोरिदम एंड सिस्टम्स लेबोरेटरी (एलएएसए) की एक शोध टीम ने हाल ही में एक नई "कीनेमेटिक इंटेलिजेंस" सीखने की विधि प्रस्तावित की है जो विभिन्न संरचनाओं वाले रोबोटों को प्रत्येक प्रकार के रोबोट के लिए नियंत्रण कोड को फिर से लिखने या अनुकूलित करने की आवश्यकता के बिना सीखने के एल्गोरिदम के एक ही सेट के माध्यम से समान कार्यों में महारत हासिल करने की अनुमति देती है। इस उपलब्धि से औद्योगिक और वैज्ञानिक अनुसंधान परिदृश्यों में नए रोबोटिक कौशल को तैनात करने के समय और लागत में काफी कमी आने की उम्मीद है।
मानव जगत में, हम लगभग 300,000 वर्षों से दूसरों के व्यवहार को देखकर, नकल करके और समायोजित करके नए कौशल सीख रहे हैं, जो समान जोड़ों के बीच हासिल करना अपेक्षाकृत आसान है। लेकिन जब वस्तु को पूरी तरह से अलग शारीरिक संरचना और संज्ञानात्मक तरीकों वाले अन्य जानवरों द्वारा प्रतिस्थापित किया जाता है, तो सरल नकल मुश्किल हो जाती है; पौधों, कवक, प्रोटिस्ट और यहां तक कि बैक्टीरिया के लिए, मनुष्य उनसे मोटर कौशल "सीखने" के बारे में बात भी नहीं कर सकते हैं। रोबोटिक्स के क्षेत्र में, भले ही हम रोबोटों को मानव प्रदर्शनों के अनुसार कार्य करने और यहां तक कि मनुष्यों की तुलना में बहुत तेज गति से कार्य पूरा करने के लिए मजबूर कर सकते हैं, लेकिन पूरी तरह से अलग संरचनाओं और प्रणालियों वाले रोबोट कैसे सीखे गए कौशल का एक ही सेट साझा कर सकते हैं, यह अभी भी एक दीर्घकालिक समस्या है।
साइंस रोबोटिक्स में प्रकाशित नवीनतम पेपर में, स्थिरप्रज्ञा गुप्ता, औड बिलार्ड और अन्य ने प्रस्तावित किया कि "सीखने-से-प्रदर्शन (एलएफडी)" ढांचे के तहत गतिज बुद्धि का उपयोग करके, आर2डी2 और एक डिशवॉशर जैसे विभिन्न आकार वाले रोबोट नई क्रियाएं सीख सकते हैं जिन्हें एक ही मानव प्रदर्शन से अलग से किया जा सकता है। एक ही मॉडल के रोबोटों के बीच केवल कौशल स्थानांतरित करने की पिछली प्रथा से अलग, यह प्रणाली गणितीय रूप से प्रदर्शन क्रियाओं को मॉडल करती है और उन्हें सार्वभौमिक रणनीतियों में बदल देती है जिन्हें विभिन्न रोबोट संयुक्त लेआउट, गति की सीमा और स्थिरता बाधाओं के लिए अनुकूलित किया जा सकता है।
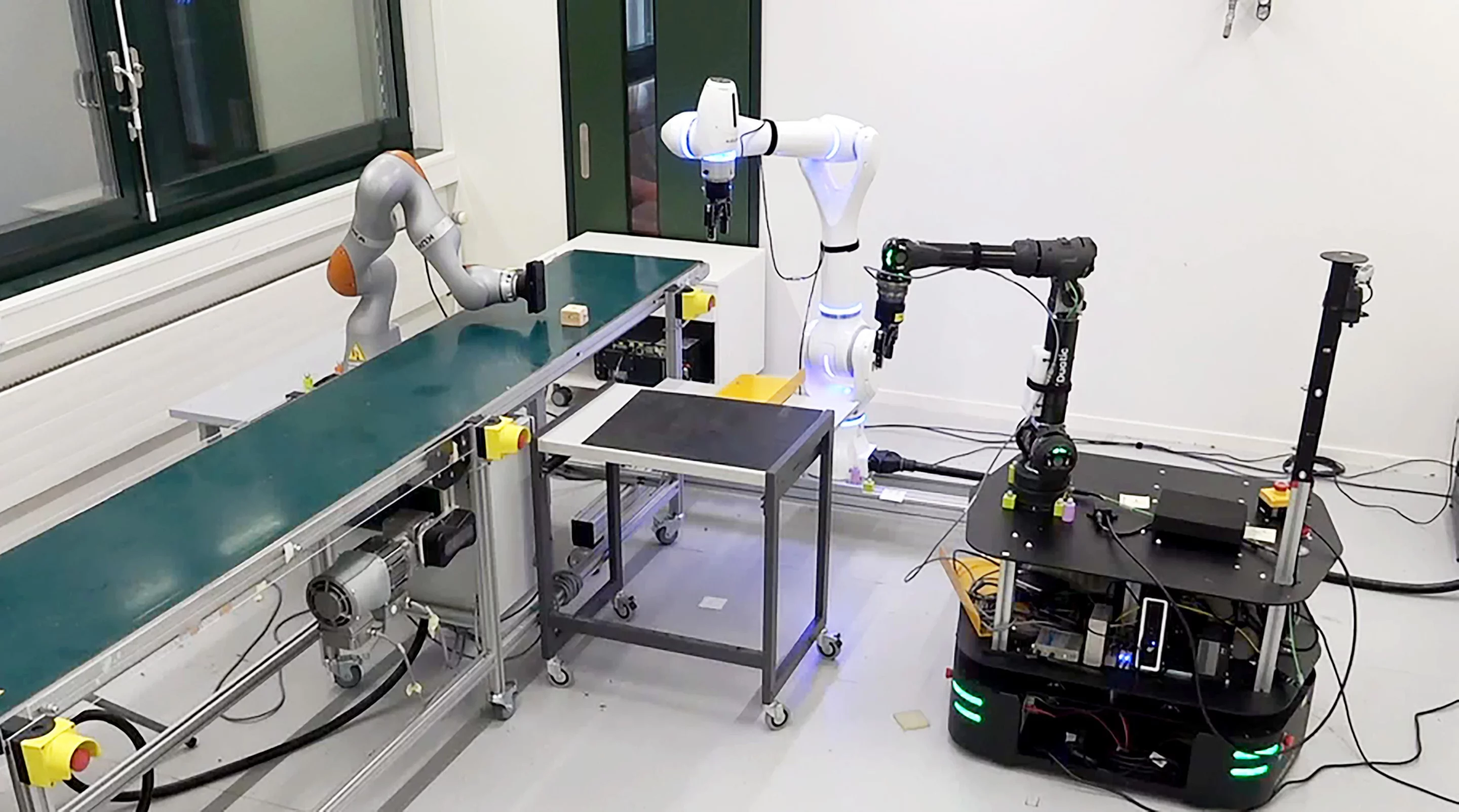
अनुसंधान टीम ने औद्योगिक असेंबली परिदृश्यों में वस्तुओं को रखने, धकेलने और फेंकने जैसे कार्यों की एक श्रृंखला को रिकॉर्ड करने के लिए सबसे पहले मोशन कैप्चर का उपयोग किया। इसके बाद, उन्होंने रोबोट की भौतिक बाधाओं का वर्णन करने के लिए एक वर्गीकरण प्रणाली स्थापित की, जिसमें संतुलन सीमा, गति की संयुक्त सीमा आदि शामिल हैं, और इस जानकारी को गति कैप्चर डेटा के साथ जोड़कर एक अवलोकन और अनुकूली शिक्षण मॉडल बनाया जिसे विभिन्न प्लेटफार्मों द्वारा बुलाया जा सकता है। प्रयोग में, पूरी तरह से अलग आकार और तंत्र वाले तीन वाणिज्यिक रोबोट कार्यों के एक सेट को स्थिर रूप से पूरा करने में सक्षम थे जैसे कि लकड़ी के ब्लॉकों को कन्वेयर बेल्ट से कार्य स्टेशन तक धकेलना, फिर उन्हें टेबल तक पहुंचाना और अंत में मानव प्रदर्शनों को देखकर उन्हें निर्दिष्ट कंटेनरों में फेंकना।
मुख्य प्रौद्योगिकियों में से एक तथाकथित "विश्व स्तर पर स्थिर गतिशील प्रणाली" है, जो रोबोट को सीखे गए एक्शन स्पेस के भीतर आंदोलन प्रक्रिया की भविष्यवाणी और सुरक्षा सुनिश्चित करने की अनुमति देती है। शोधकर्ताओं ने कहा कि किसी कार्य को करते समय प्रत्येक रोबोट जिन चरणों के लिए जिम्मेदार होता है, उन्हें परस्पर समायोजित किया जा सकता है, और सिस्टम अभी भी सामान्य रूप से काम कर सकता है; अलग-अलग रोबोट एक ही कौशल को इस तरह से समझेंगे और उसका पुनर्निर्माण करेंगे जो उनकी अपनी भौतिक स्थितियों के अनुरूप हो, लेकिन हमेशा एक सुरक्षित और व्यवहार्य सीमा के भीतर। LASA प्रयोगशाला के प्रमुख औड बिलार्ड ने कहा कि यह काम रोबोटिक्स में लंबे समय से चली आ रही चुनौती को हल करता है: पूर्वानुमानित और सुरक्षित व्यवहार सुनिश्चित करते हुए विभिन्न यांत्रिक संरचनाओं वाले रोबोटों के बीच सीखे गए कौशल को कैसे स्थानांतरित किया जाए।
अनुप्रयोग परिप्रेक्ष्य से, इस गतिज बुद्धिमत्ता ढाँचे का अर्थ है कि औद्योगिक उत्पादन लाइनों या सेवा परिदृश्यों में रोबोटों को जोड़ते या प्रतिस्थापित करते समय, हार्डवेयर के प्रत्येक नए टुकड़े के लिए एक्शन कोड को फिर से लिखने की कोई आवश्यकता नहीं है। कौशल इंजेक्शन को सीमित संख्या में या एक मानव प्रदर्शन प्रदान करके भी पूरा किया जा सकता है। यह न केवल पेशेवर प्रोग्रामिंग और नियंत्रण सिद्धांत ज्ञान पर निर्भरता को कम करता है, बल्कि छोटे और मध्यम आकार के उद्यमों के लिए विविध रोबोटिक उपकरणों का उपयोग करने की सीमा को भी कम करता है। पेपर के सह-प्रथम लेखक गुप्ता ने इस बात पर जोर दिया कि प्रयोग में, जिस तरह से प्रत्येक रोबोट ने कार्य चरणों को विभाजित किया, उसे किसी भी समय समायोजित किया जा सकता है, और संपूर्ण सिस्टम अभी भी उच्च स्तर के लचीलेपन को दिखाते हुए ऑपरेशन प्रक्रिया को सफलतापूर्वक पूरा कर सकता है।
परियोजना का अगला चरण मानव ऑपरेटरों को प्राकृतिक भाषा विवरणों के माध्यम से स्वयं प्रदर्शन क्रियाएं किए बिना संबंधित व्यवहार उत्पन्न करने और निष्पादित करने की अनुमति देना है। एक अन्य सह-प्रथम लेखक, दुर्गेश हरिभाऊ सालुंखे ने कहा कि टीम को तकनीकी पृष्ठभूमि की आवश्यकता को पूरी तरह खत्म करने की उम्मीद है: उपयोगकर्ताओं को केवल विचार और वांछित व्यवहार लाने की जरूरत है, और रोबोट बाकी काम करेगा। यदि प्रासंगिक अनुसंधान आगे बढ़ना जारी रहता है, तो यह "कौशल का क्रॉस-मोडल साझाकरण" सीखने की विधि भविष्य के रोबोट सिस्टम की बुनियादी क्षमता बनने की उम्मीद है, जिससे अधिक वास्तविक दुनिया के परिदृश्यों में रोबोट की तैनाती में तेजी आएगी।